Getting Started with MBNpy
This guide intorudces using MBNpy for risk/reliability analysis of system event. This guide walks through installation, defining variables and probability distributions, and performing system analysis.
Installation
MBNpy is available via pip:
pip install mbnpy
To install from source:
git clone https://github.com/jieunbyun/MBNpy.git
cd MBNpy
pip install .
MBNpy requires Python 3.12+.
Example Problem
This example demonstrates application for the reliability block diagram from the 2019 MBN paper.
The system consists of 8 components (\(X1\) to \(X8\)), each with two states:
\(0\): Failure
\(1\): Survival
Components are statistically independent with:
\(P(X_i=0) = 0.1\)
\(P(X_i=1) = 0.9\)
The system state (:math:`X_9`) depends on the connection from source to sink.
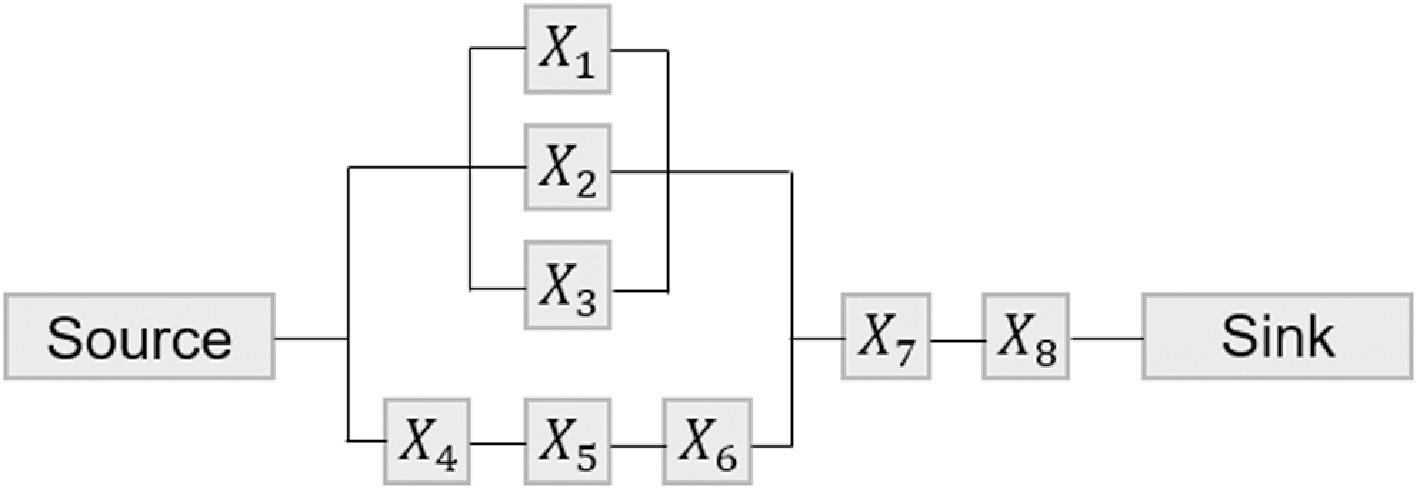
Figure 1: Reliability block diagram (RBD).
The Bayesian network (BN) representation is:
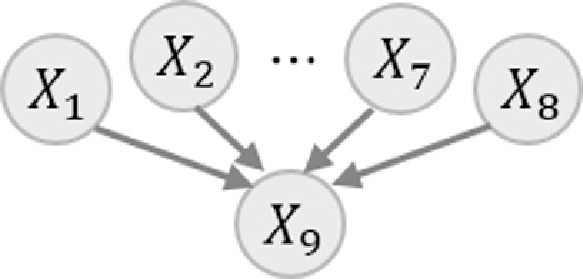
Figure 2: Bayesian network representation of the system.
Objectives
Compute the system failure probability \(P(X_9=0)\).
Identify critical components using component importance measures.
For technical details, see:
Byun et al. (2019) Matrix-based Bayesian networks, Reliability Engineering & System Safety, 185, 533-545.
Byun & Song (2021) Generalized matrix-based Bayesian networks, Reliability Engineering & System Safety, 211, 107468.
Defining Variables in MBNpy
To model a Bayesian network, variables must be defined first.
Each component is a Variable object:
from mbnpy import variable
varis = {}
varis['x1'] = variable.Variable(name='x1', values=['f', 's'])
The variable dictionary (
varis) stores all model variables."f"and"s"correspond to failure (0) and survival (1).The numerical index assigned to each state is determined by its position in the
valueslist.
All 8 components are defined using a loop:
n_comp = 8
for i in range(1, n_comp):
varis[f'x{i+1}'] = variable.Variable(name=f'x{i+1}', values=['f', 's'])
print(varis['x8']) # Check last component
The system variable (\(X_9\)) is defined similarly:
varis['x9'] = variable.Variable(name='x9', values=['f', 's'])
Defining Probability Distributions
The conditional probability matrix (CPM) represents probability distributions.
Since components (\(X_1\) to \(X_8\)) have no parents, they are defined as marginal probabilities:
from mbnpy import cpm
import numpy as np
cpms = {}
cpms['x1'] = cpm.Cpm(
variables=[varis['x1']],
no_child=1,
C=np.array([[0], [1]]),
p=np.array([0.1, 0.9])
)
variables: A list of variables involved in the distribution (e.g.,X1).no_child: The number of child nodes (1 in this case).C(Event Matrix): Specifies the state of each instance.p(Probability Vector): Defines the corresponding probabilities.
This process is repeated for all components:
for i in range(1, n_comp):
cpms[f'x{i+1}'] = cpm.Cpm(
variables=[varis[f'x{i+1}']],
no_child=1,
C=np.array([[0], [1]]),
p=np.array([0.1, 0.9])
)
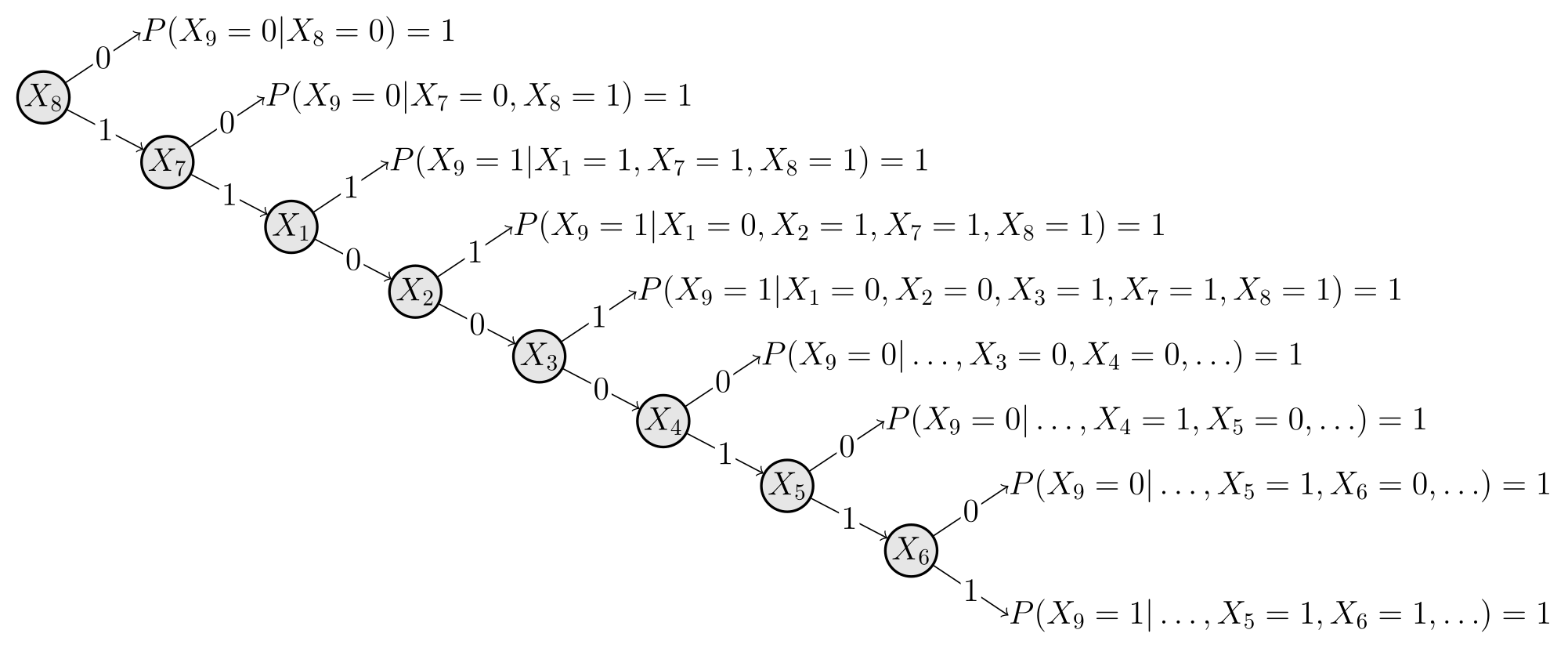
The system (\(X_9\)) is defined using the branch-and-bound method:
The Csys and psys matrices are constructed (for more information about building C matrices, see composite state tutorial <https://jieunbyun.github.io/MBNpy-docs/composite_states>_):
Csys = np.array([
[0, 2, 2, 2, 2, 2, 2, 2, 0],
[0, 2, 2, 2, 2, 2, 2, 0, 1],
[1, 1, 2, 2, 2, 2, 2, 1, 1],
[1, 0, 1, 2, 2, 2, 2, 1, 1],
[1, 0, 0, 1, 2, 2, 2, 1, 1],
[0, 0, 0, 0, 0, 2, 2, 1, 1],
[0, 0, 0, 0, 1, 0, 2, 1, 1],
[0, 0, 0, 0, 1, 1, 0, 1, 1],
[1, 0, 0, 0, 1, 1, 1, 1, 1]
])
psys = np.array([[1.0] * 9]).T
cpms['x9'] = cpm.Cpm(
variables=[varis['x9'], varis['x1'], varis['x2'], varis['x3'], varis['x4'],
varis['x5'], varis['x6'], varis['x7'], varis['x8']],
no_child=1,
C=Csys,
p=psys
)
Notes on the branch-and-bound methods and building CPMs
Each branch forms a row in the CPM for \(P(X_9|X_1, \ldots, X_8)\), where the nine branches lead to the nine rows in
Csysandpsys.For example,
Csys’s first row represents the top branch:[0, 2, 2, 2, 2, 2, 2, 2, 0]indicates that if \(X_8=0\), then \(X_9=0\).The probabilistic relation \(P(X_9=0|X_8=0) = 1\) is represented in
psysas1.0.For deterministic systems whose state is fully determined by their components’ states (which is the case here), the probability vector
pcontains only1.0values.The composite state
2in the event matrixCdenotes a “don’t care” condition (i.e. it can represent the state of either0or1), meaning that the corresponding component’s state does not affect the outcome.For example, in the first row of
Csys, all components except \(X_8\) are marked as2, indicating that their states do not influence the system state when \(X_8=0\).The most important constraint when building a CPM is that the rows in the event matrix
Cmust be mutually exclusive so that no instances are double-counted. The branch-and-bound method ensures this condition is met.For example, since the first row of
Csysalready accounts for all cases where \(X_8=0\), the second row only needs to consider cases where \(X_8=1\).For general systems, manual construction of branch-and-bound trees often becomes infeasible.
In such cases, the BRC algorithm can be used to automatically build a branch-and-bound tree and thereby construct the CPM.
System Analysis
Variable elimination is applied to compute the system failure probability. To determine the probability distribution of the system event, all component variables except for \(X_9\) are eliminated.
Note that the second argument of the variable_elim function is a list of variables to eliminate, in the order they should be eliminated.
from mbnpy import inference
# Compute P(X_9) by eliminating all component variables
cpm_sys = inference.variable_elim(
cpms = cpms, var_elim = [varis['x1'], varis['x2'], varis['x3'], varis['x4'], varis['x5'], varis['x6'], varis['x7'], varis['x8']]
)
# Get probability P(X_9=0) from the resulting CPM
prob_s0 = cpm_sys.get_prob(['x9'], [0])
print(f'System failure probability P(X9=0): {prob_s0:.2f}')
Component importance measures are calculated, following Kang et al. (2008)’s definition \(CIM_i = P(X_i=0|X_9=0) = P(X_i=0,X_9=0) / P(X_9=0)\):
CIMs = {}
for i in range(n_comp):
# Current component of interest
var_i = f'x{i+1}'
# Variables to eliminate: all except the component of interest and the system variable
varis_elim = [varis['x1'], varis['x2'], varis['x3'], varis['x4'], varis['x5'], varis['x6'], varis['x7'], varis['x8']]
varis_elim.remove(varis[var_i])
# Compute P(X_i, X_9)
cpm_sys_xi = inference.variable_elim(cpms = cpms, var_elim = varis_elim)
# Get probability P(X_i=0, X_9=0) from the resulting CPM
prob_s0_x0 = cpm_sys_xi.get_prob([f'x{i+1}', 'x9'], [0,0])
# Compute CIM_i = P(X_i=0|X_9=0) = P(X_i=0, X_9=0) / P(X_9=0)
CIMs[f'x{i+1}'] = prob_s0_x0 / prob_s0 # prob_s0 represents P(X_9=0), from the previous computation
print(CIMs)